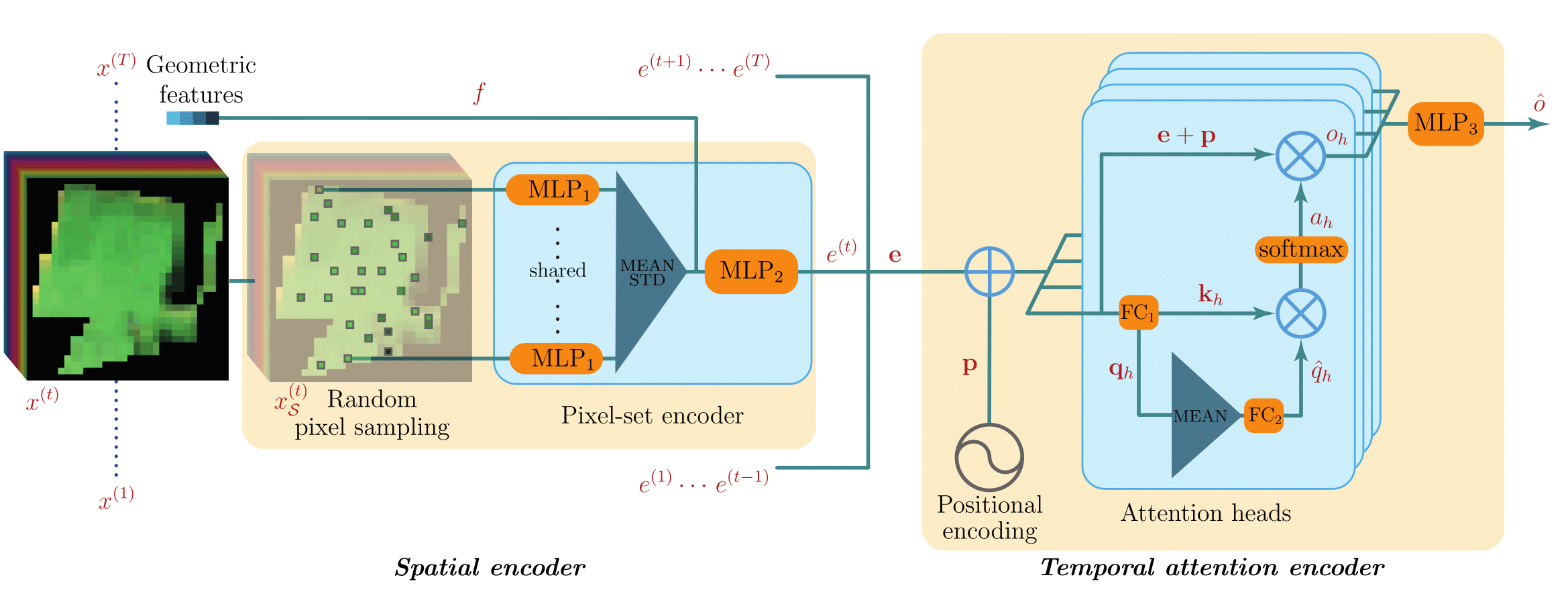
Satellite Image Time Series Classification with Pixel-Set Encoders and Temporal Self-Attention (CVPR 2020, Oral)
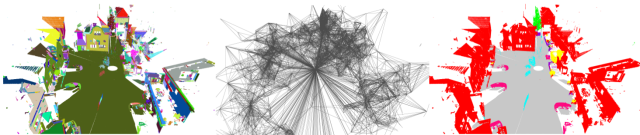
Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs (CVPR2018 + CVPR2019)
Cut pursuit (ICML2018)
https://github.com/1a7r0ch3/CP_PFDR_graph_d1
C++ implementation of the cut pursuit algorithm for non-smooth fucntions regularized by the graph total variation, with MATLAB, Octave and python wrappers.
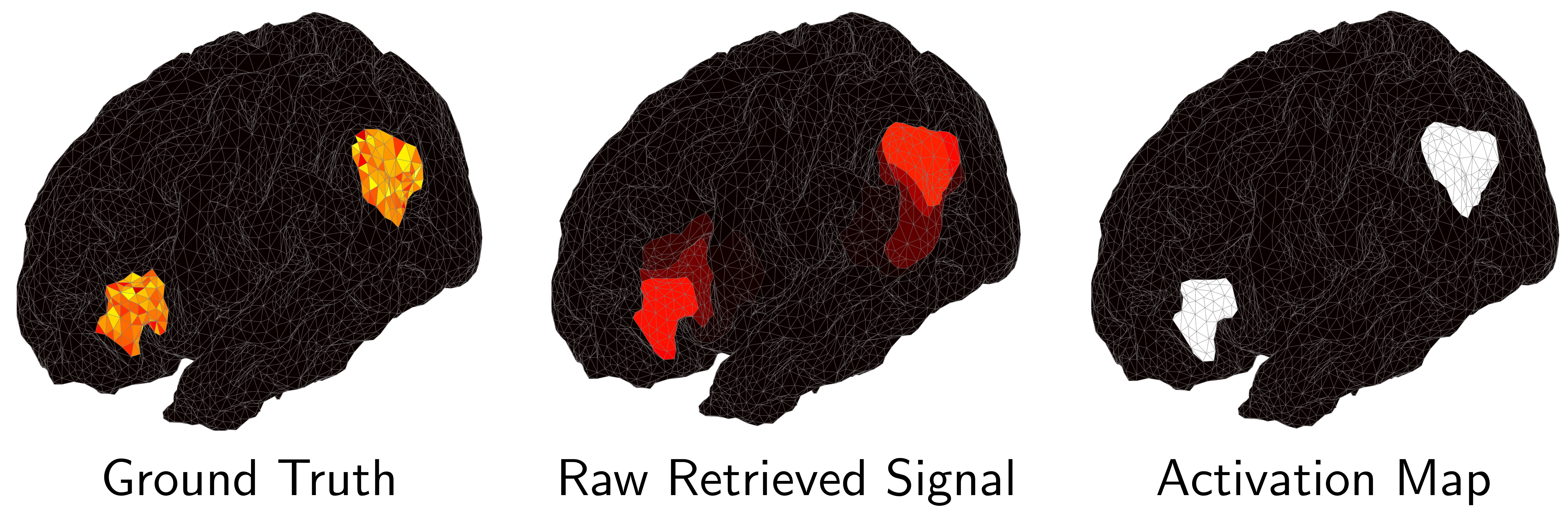
L0-Cut pursuit (SIIMS, 2017)
https://github.com/loicland/cut-pursuit
Implementation of the L0-cut pursuit algorithms to compute piecewise constant approximation of a function defined on a graph when regularized by the weight of the cuts between adjacent constant components.
Regularization and segmentation framework for point clouds classification (ISPRS, 2017)
https://github.com/loicland/point-cloud-regularization
Regularization
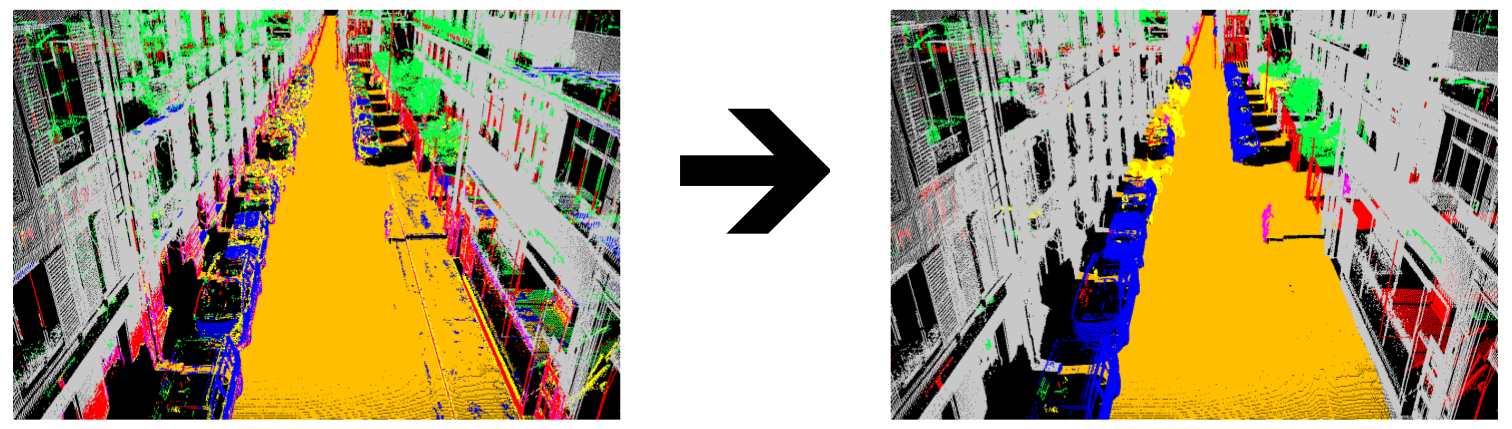
Provide a benchmark of all methods presented in the paper `A structured regularization framework for spatially smoothing semantic labelings of 3D point clouds`. OPython/Pytorch implementation of the superpoint graph algorithm for semantic segmentation of large point clouds.nly require a ply file and a probabilistic classification to smooth.
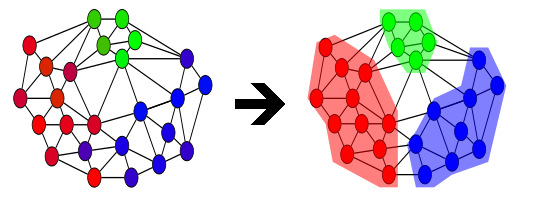
Clustering

An interface for fast partition of point clouds into geometrically simple shapes. I does not provide a one-to-tone instance segmentation of objects, but a sursegmentation in which the clusters are generally semantically homogeneous. As used in the SuperPoint Graph paper.
